Calibration
Overview
This group defines all required functions to calibrate dosing units or to set the internal position counter of devices to a defined state.
 Collaboration diagram for Calibration:
Collaboration diagram for Calibration:
Functions | |
| long | NemCalibrate (TNemesys *Nemesys, uint32_t Velocity) |
| Execute reference move (homing move) for single dosing unit. More... | |
| long | NemRestorePos (TNemesys *Nemesys, int32_t dwPos) |
| Restore position value. More... | |
Function Documentation
| long NemCalibrate | ( | TNemesys * | Nemesys, |
| uint32_t | Velocity | ||
| ) |
Execute reference move (homing move) for single dosing unit.
If the device executes an reference move, then the pusher is moved towards the lower limit sensor.
- Parameters
-
[in] Nemesys Device to calibrate [in] Velocity Speed of calibbration move in mrpm (millirevolutions per minute)
- Returns
- Error code - ERR_NOERR indicates success
homing mode - required for calibration and position counter stting
Definition: nem_rs232_api.c:93
static long Nem_SetHomingMode(TNemesys *Nemesys, THomingMode Mode)
Change homing mode for refernce move.
Definition: nem_rs232_api.c:692
static long Nem_SetHomingSpeed(TNemesys *Nemesys, uint32_t Velocity)
Change speed for calibration move.
Definition: nem_rs232_api.c:683
static long Nem_SetOpMode(TNemesys *Nemesys, TNemOpModes OpMode)
Change operation mode of neMESYS device.
Definition: nem_rs232_api.c:664
#define CWBIT_HOMING_START
controlword bit start homing move
Definition: nem_rs232_api.c:40
static long Nem_SetControlWord(TNemesys *Nemesys, uint16_t wControlWord)
Transmits the controlword to the device.
Definition: nem_rs232_api.c:711
static long Nem_SetHomePos(TNemesys *Nemesys, int32_t dwHomePos)
Set the value of the psotion counter on end of refernce move.
Definition: nem_rs232_api.c:702
CSI_API void CsiSleep(uint32_t Milliseconds)
Function to sleep for a certain amount of milliseconds.
Definition: csi_common.c:30
Here is the call graph for this function: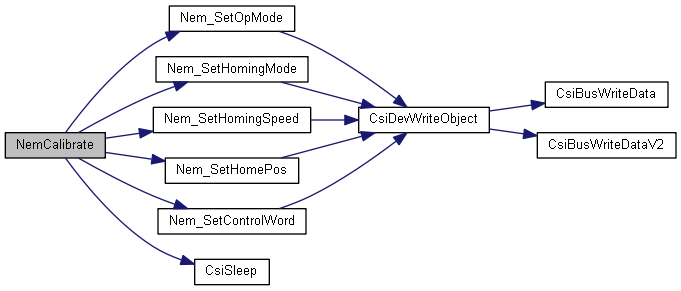
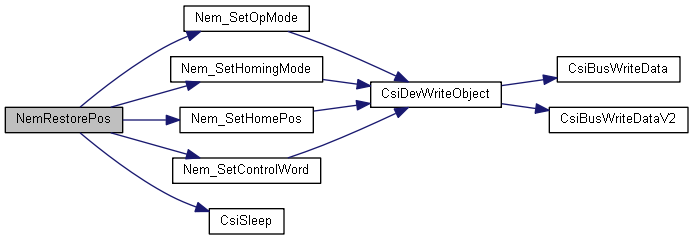
| long NemRestorePos | ( | TNemesys * | Nemesys, |
| int32_t | dwPos | ||
| ) |
Restore position value.
If the neMESYS device is switched off, the internal position value will get lost. If the device is swicthed on again later, normally a calibration move is necessary to initialize the internal position counter. If the application stored the last position value before device switch off, then it is possible to restore the position value by calling this function.
- Parameters
-
[in] Nemesys Device to setup [in] dwPos The position value to store in internal position counter.
- Returns
- Error code - ERR_NOERR indicates success
homing mode - required for calibration and position counter stting
Definition: nem_rs232_api.c:93
static long Nem_SetHomingMode(TNemesys *Nemesys, THomingMode Mode)
Change homing mode for refernce move.
Definition: nem_rs232_api.c:692
Take actual position as home position (setting position counter)
Definition: nem_rs232_api.c:190
static long Nem_SetOpMode(TNemesys *Nemesys, TNemOpModes OpMode)
Change operation mode of neMESYS device.
Definition: nem_rs232_api.c:664
#define CWBIT_HOMING_START
controlword bit start homing move
Definition: nem_rs232_api.c:40
static long Nem_SetControlWord(TNemesys *Nemesys, uint16_t wControlWord)
Transmits the controlword to the device.
Definition: nem_rs232_api.c:711
static long Nem_SetHomePos(TNemesys *Nemesys, int32_t dwHomePos)
Set the value of the psotion counter on end of refernce move.
Definition: nem_rs232_api.c:702
CSI_API void CsiSleep(uint32_t Milliseconds)
Function to sleep for a certain amount of milliseconds.
Definition: csi_common.c:30
Here is the call graph for this function: