

Initialization and Configuration
Overview
Functions for device initialization and syringe configuration.
 Collaboration diagram for Initialization and Configuration:
Collaboration diagram for Initialization and Configuration:
Functions | |
| long | NemV4DevInit (struct CsiBus *Bus, uint8_t NodeId, TNemesysV4 *Nemesys) |
| Initialize Nemesys device object with all parameters. More... | |
| void | NemV4SetSyringe (TNemesysV4 *Nemesys, double InnerSyringeDiameter_mm) |
| Configure the syringe that is used for flow and volume unit conversion. More... | |
Function Documentation
| long NemV4DevInit | ( | struct CsiBus * | Bus, |
| uint8_t | NodeId, | ||
| TNemesysV4 * | Nemesys | ||
| ) |
Initialize Nemesys device object with all parameters.
This function reads configuration parameters from Nemesys and stores the parameters into the Nemesys object. After a call to this function all other functions that require a valid Nemesys object can be called.
- Parameters
-
Bus Reference of bus object the Nemesys is attached to NodeId NodeId of dosing unit to initialize Nemesys Reference to Nemesys object to initialize
- Returns
- Error code - ERR_NOERR indicates successful initialization
int32_t MinPos
minimum position of pusher in increments
Definition: nem4_rs232_api.h:109
void NemV4SetSyringe(TNemesysV4 *Nemesys, double InnerSyringeDiameter_mm)
Configure the syringe that is used for flow and volume unit conversion.
Definition: nem4_rs232_api.c:533
long CsiDevInit(struct CsiBus *pBus, uint8_t NodeId, struct CsiDev *pDev, enum CsiSerialProtocolVersion SerProtocolVersion)
Initialize CSI device object with all parameters.
Definition: csi_dev.c:127
double PosUnitsPerRevolution
conversion factor between Nemesys position units and revolutions
Definition: nem4_rs232_api.h:113
long CsiDevReadObject(struct CsiDev *pDev, uint16_t ObjDicIdx, uint8_t ObjDicSub, uint32_t *pRxDWord)
This function reads up to 4 bytes of data from device object dictionary.
Definition: csi_dev.c:157
static long NemV4_SetOpMode(TNemesysV4 *Nemesys, TNemOpModes OpMode)
Change operation mode of Nemesys device.
Definition: nem4_rs232_api.c:650
int32_t MaxPos
maximum position of pusher in increments
Definition: nem4_rs232_api.h:110
profile psoition mode - required for any dosing task
Definition: nem4_rs232_api.c:81
uint32_t MaxVelocity
stores the maximum velocity
Definition: nem4_rs232_api.h:108
double VelUnitsPerRPM
conversion factor between Nemesys velocity units and RPM
Definition: nem4_rs232_api.h:114
Here is the call graph for this function: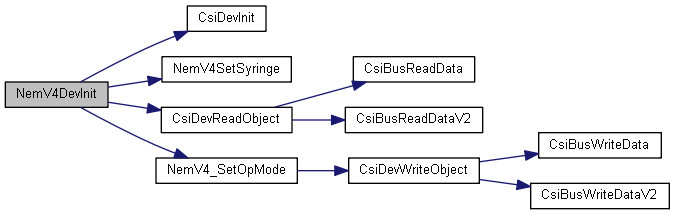
| void NemV4SetSyringe | ( | TNemesysV4 * | Nemesys, |
| double | InnerSyringeDiameter_mm | ||
| ) |
Configure the syringe that is used for flow and volume unit conversion.
- Parameters
-
Nemesys Nemesys device to configure [in] InnerSyringeDiameter_mm The inner syringe diameter in mm
Referenced by NemV4DevInit().
double InnerSyringeDiameter_mm
conversion factor speed/position into velocity/volume
Definition: nem4_rs232_api.h:115
double InnerSyringeArea_mm2
stores the calculated inner syringe area
Definition: nem4_rs232_api.h:116