

Application programming interface for control of Nemesys via RS232. More...
 Include dependency graph for nem4_rs232_api.c:
Include dependency graph for nem4_rs232_api.c:
Data Structures | |
| struct | TwoPointScaling |
| The two points for a two point scaling. More... | |
Macros | |
| #define | CWBIT_FAULT_RESET 0x0080 |
| controlword bit fault reset | |
| #define | CWBIT_HALT 0x0100 |
| controlword bit halt | |
| #define | CWBIT_HOMING_START 0x0010 |
| controlword bit start homing move | |
| #define | CWBIT_IMMEDIATELY 0x0020 |
| change set immediately | |
| #define | CWBIT_NEW_SET_POINT 0x0010 |
| new set point | |
| #define | CWBIT_OP_EN 0x0008 |
| controlword bit operation enabled | |
| #define | CWBIT_QUICK_STOP 0x0004 |
| controlword bit quick stop | |
| #define | CWBIT_RELATIVE 0x0040 |
| target position is an relative value | |
| #define | CWBIT_SWON 0x0001 |
| controlword bit switch on | |
| #define | CWBIT_VOLT_EN 0x0002 |
| controlword bit voltage enabled | |
| #define | DRV_PROC_TIME 10 |
| processing time | |
| #define | STATE_IS_FAULT(_wState_) (((_wState_) & 0x004F) == SW_FAULT) |
| Checks if state is fault. | |
| #define | STATE_IS_FAULT_REAC(_wState_) (((_wState_) & 0x004F) == SW_FAULT_REAC) |
| Checks if state is fault reaction active. | |
| #define | STATE_IS_OP_EN(_wState_) (((_wState_) & 0x006F) == SW_OP_EN) |
| Checks if state is operation enabled. | |
| #define | STATE_IS_QUICK_STOP(_wState_) (((_wState_) & 0x006F) == SW_QUICK_STOP) |
| Checks if state is quick stop. | |
| #define | STATE_IS_SWON(_wState_) (((_wState_) & 0x006F) == SW_SWON) |
| Checks if state is switch on. | |
| #define | STATE_IS_SWON_DIS(_wState_) (((_wState_) & 0x004F) == SW_SWON_DIS) |
| Checks if state is disabled. | |
| #define | STATE_IS_SWON_NOT_RDY(_wState_) (((_wState_) & 0x004F) == SW_SWON_NOT_RDY) |
| Checks if state is not ready to witch on. | |
| #define | STATE_IS_SWON_RDY(_wState_) (((_wState_) & 0x006F) == SW_SWON_RDY) |
| Checks if state is ready to switch on. | |
| #define | SWBIT_FAULT 0x0008 |
| fault | |
| #define | SWBIT_INT_LIM 0x0800 |
| internal limit active | |
| #define | SWBIT_OP_EN 0x0004 |
| operation enabled | |
| #define | SWBIT_QUICK_STOP 0x0020 |
| quick stop | |
| #define | SWBIT_REMOTE 0x0200 |
| remote | |
| #define | SWBIT_SWON 0x0002 |
| switched on | |
| #define | SWBIT_SWON_DIS 0x0040 |
| switch on disabled | |
| #define | SWBIT_SWON_RDY 0x0001 |
| ready to switch on | |
| #define | SWBIT_TARG_REACHED 0x0400 |
| target reached | |
| #define | SWBIT_VOLT_EN 0x0010 |
| voltage enabled | |
| #define | SWBIT_WARNING 0x0080 |
| warning | |
Typedefs | |
| typedef enum eCtrlWord | TCtrlWord |
| Control words of object dictionary entry OD_H6040_CTRL_WORD. | |
| typedef enum eDigOutPurpose | TDigOutPurpose |
EPOS sepecific purpose of digital outputs | |
| typedef enum eErrHistSub | TErrHistSub |
| Error history sub indexes. | |
| typedef enum eNemObjDicEntries | TNemObjDicEntries |
| Object dictionary entries. | |
| typedef enum eNemOpModes | TNemOpModes |
| Enumeration of Nemesys deviceoperation modes. | |
| typedef struct TwoPointScaling | TNemTwoPointScaling |
| The two points for a two point scaling. | |
| typedef enum eStatusWord | TStatusWord |
| Status words of object dictionary entry OD_H6041_STATUS_WORD. | |
Enumerations | |
| enum | eCtrlWord { CW_SHUTDOWN = 0x06, CW_SWON = 0x07, CW_VOLT_DIS = 0x00, CW_QUICK_STOP = 0x02, CW_OP_DIS = 0x07, CW_OP_EN = 0x0F, CW_FAULT_RST = 0x80, CW_UNDEFINED = 0xFF, CW_SHUTDOWN = 0x06, CW_SWON = 0x07, CW_VOLT_DIS = 0x00, CW_QUICK_STOP = 0x02, CW_OP_DIS = 0x07, CW_OP_EN = 0x0F, CW_FAULT_RST = 0x80, CW_UNDEFINED = 0xFF } |
| Control words of object dictionary entry OD_H6040_CTRL_WORD. More... | |
| enum | eDigOutPurpose { DIG_OUT_GENERAL_PURPOSE_A = 0x010000, DIG_OUT_GENERAL_PURPOSE_B = 0x100000, DIG_OUT_GENERAL_PURPOSE_A = 0x8000, DIG_OUT_GENERAL_PURPOSE_B = 0x4000, DIG_OUT_GENERAL_PURPOSE_C = 0x2000, DIG_OUT_GENERAL_PURPOSE_D = 0x1000 } |
EPOS sepecific purpose of digital outputs | |
| enum | eErrHistSub { H1003_SUB_01_NUMBER_OF_ERR = 0, H1003_SUB_01_ERR_IDX_1 = 1, H1003_SUB_01_NUMBER_OF_ERR = 0, H1003_SUB_01_ERR_IDX_1 = 1 } |
| Error history sub indexes. | |
| enum | eNemObjDicEntries { NemV4_OD_H1003_ERROR_HISTORY = 0x1003, NemV4_OD_H210C_CUSTOM_PERSISTENT_MEM = 0x210C, NemV4_OD_H3000_AXIS_CONFIGURATION = 0x3000, NemV4_OD_H3003_GEAR_CONFIGURATION = 0x3003, NemV4_OD_H3141_DIG_INPUTS_PROPERTIES = 0x3141, NemV4_OD_H3160_ANALOG_INPUT = 0x3160, NemV4_OD_H3182_ANALOG_OUT = 0x3182, NemV4_OD_H6040_CTRL_WORD = 0x6040, NemV4_OD_H6041_STATUS_WORD = 0x6041, NemV4_OD_H6060_OP_MODE = 0x6060, NemV4_OD_H6064_ACTUAL_POSITION = 0x6064, NemV4_OD_H606B_VELOCITY_DEMAND = 0x606B, NemV4_OD_H607A_TARGET_POSITION = 0x607A, NemV4_OD_H607D_SW_POS_LIMITS = 0x607D, NemV4_OD_H607F_PROFILE_VELOCITY_MAX = 0x607F, NemV4_OD_H6081_PROFILE_VELOCITY = 0x6081, NemV4_OD_H60A9_SI_UNIT_VELOCITY = 0x60A9, NemV4_OD_H60AA_SI_UNIT_ACCELERATION = 0x60AA, NemV4_OD_H60FD_DIGITAL_INPUTS = 0x60FD, NemV4_OD_H60FE_DIG_OUT = 0x60FE, NEM_OD_H1003_ERROR_HISTORY = 0x1003, NEM_OD_H200C_CUSTOM_PERSISTENT_MEM = 0x200C, NEM_OD_H2078_DIGITAL_OUT_FUNC = 0x2078, NEM_OD_H2081_HOME_POSITION = 0x2081, NEM_OD_H6040_CTRL_WORD = 0x6040, NEM_OD_H6041_STATUS_WORD = 0x6041, NEM_OD_H6060_OP_MODE = 0x6060, NEM_OD_H6064_ACTUAL_POSITION = 0x6064, NEM_OD_H606B_VELOCITY_DEMAND = 0x606B, NEM_OD_H607A_TARGET_POSITION = 0x607A, NEM_OD_H607C_HOME_OFFSET = 0x607C, NEM_OD_H6081_PROFILE_VELOCITY = 0x6081, NEM_OD_H6098_HOMING_METHOD = 0x6098, NEM_OD_H6099_HOMING_SPEEDS = 0x6099 } |
| Object dictionary entries. | |
| enum | eNemOpModes { NemV4_OP_MODE_PROFILE_POSITION = 1, NemV4_OP_MODE_HOMING = 6, NEM_OP_MODE_PROFILE_POSITION = 1, NEM_OP_MODE_HOMING = 6 } |
| Enumeration of Nemesys deviceoperation modes. More... | |
| enum | eStatusWord { SW_SWON_NOT_RDY = 0x00, SW_SWON_DIS = 0x40, SW_SWON_RDY = 0x21, SW_SWON = 0x23, SW_OP_EN = 0x27, SW_QUICK_STOP = 0x07, SW_FAULT_REAC = 0x0F, SW_FAULT = 0x08, SW_UNDEFINED = 0xFF, SW_SWON_NOT_RDY = 0x00, SW_SWON_DIS = 0x40, SW_SWON_RDY = 0x21, SW_SWON = 0x23, SW_OP_EN = 0x27, SW_QUICK_STOP = 0x07, SW_FAULT_REAC = 0x0F, SW_FAULT = 0x08, SW_UNDEFINED = 0xFF } |
| Status words of object dictionary entry OD_H6041_STATUS_WORD. More... | |
Functions | |
| static long | NemV4_ClearErrHist (TNemesysV4 *Nemesys) |
| Clears the device error history and error register. More... | |
| static long | NemV4_ExecDrvStateCmd (TNemesysV4 *Nemesys, uint16_t wCmd, uint16_t *pwState, uint16_t wProcessTime) |
| Execute one single drive state command. More... | |
| static long | NemV4_InitDigOutShadowRegister (TNemesysV4 *Nemesys) |
| static long | NemV4_InitForceScalingParam (TNemesysV4 *Nemesys) |
| static long | NemV4_IsState (TNemesysV4 *Nemesys, uint16_t wMask, uint16_t wState, uint8_t *pResult) |
| Test the status word for a certain bit pattern. More... | |
| static long | NemV4_SetControlWord (TNemesysV4 *Nemesys, uint16_t wControlWord) |
| Transmits the controlword to the device. More... | |
| static long | NemV4_SetOpMode (TNemesysV4 *Nemesys, TNemOpModes OpMode) |
| Change operation mode of Nemesys device. More... | |
| long | NemV4ClearFault (TNemesysV4 *Nemesys) |
| Clear fault state of Nemesys. More... | |
| double | NemV4DevicePosToMicrolitres (TNemesysV4 *Nemesys, int32_t Pos) |
| Converts a device position in inc. More... | |
| double | NemV4DevicePosToMillimetres (TNemesysV4 *Nemesys, int32_t Pos) |
| Convert device position in increments into position in mm. More... | |
| double | NemV4DeviceVelToMicrolitresPerMinute (TNemesysV4 *Nemesys, int32_t Velocity) |
| Converts a device velocity (likely in mrpm) in a flow rate in ul/min using the configured syringe parameters. More... | |
| double | NemV4DeviceVelToMillimetresPerMinute (TNemesysV4 *Nemesys, int32_t Velocity) |
| Converts a device velocity in device units (likely mrprm) into mm/min. More... | |
| long | NemV4DevInit (struct CsiBus *Bus, uint8_t NodeId, TNemesysV4 *Nemesys) |
| Initialize Nemesys device object with all parameters. More... | |
| long | NemV4DoseVolume (TNemesysV4 *Nemesys, double Volume_ul, double Flow_ul_min) |
| Dose a certain volume with a certain flow rate. More... | |
| long | NemV4EnableForceMonitoring (TNemesysV4 *Nemesys, int Enable) |
| Enable / Disable force monitoring functionality. More... | |
| long | NemV4GenerateFlow (TNemesysV4 *Nemesys, double Flow_ul_min) |
| Generate a constant flow until syringe is empty or full. More... | |
| long | NemV4GetCurrentFlow (TNemesysV4 *Nemesys, double *Flow_ul_min) |
| Returns the current flow in ul / min. More... | |
| long | NemV4GetCurrentVelocity (TNemesysV4 *Nemesys, int32_t *Velocity) |
| Read the actual velocity from the Nemesys. More... | |
| long | NemV4GetLastDevErr (TNemesysV4 *Nemesys, int32_t *pLastDevErr) |
| Read last Nemesys error from error register. More... | |
| long | NemV4GetMaxFlow (TNemesysV4 *Nemesys, double *Flow_ul_min) |
| Returns the maximum flow in ul / min. More... | |
| long | NemV4GetMaxSyringeLevel (TNemesysV4 *Nemesys, double *Level_ul) |
| Returns the maximum syringe level in µl. More... | |
| long | NemV4GetPosIs (TNemesysV4 *Nemesys, int32_t *PosIs) |
| Reads the actual position from the Nemesys. More... | |
| long | NemV4GetSyringeLevel (TNemesysV4 *Nemesys, double *Level_ul) |
| Returns the current syringe level in µl. More... | |
| uint32_t | NemV4IsEnabled (TNemesysV4 *Nemesys) |
| Check if Nemesys is in enabled state. More... | |
| uint32_t | NemV4IsInFaultState (TNemesysV4 *Nemesys) |
| Query fault state of Nemesys pump drive. More... | |
| long | NemV4IsSafetyStopActive (TNemesysV4 *Nemesys) |
| Reads the safety stop input. More... | |
| long | NemV4IsStopped (TNemesysV4 *Nemesys) |
| Checks if a dosing unit is moving or stopped. More... | |
| int32_t | NemV4MicrolitresPerMinuteToDeviceVel (TNemesysV4 *Nemesys, double ul_min) |
| Converts a flow rate in ul/min into a device velocity (likely in mrpm). More... | |
| int32_t | NemV4MicrolitresToDevicePos (TNemesysV4 *Nemesys, double ul) |
| Converts a volume in microliters into a device position in increments using the configred syronge parameters. More... | |
| int32_t | NemV4MillimetresPerMinuteToDeviceVel (TNemesysV4 *Nemesys, double mm_min) |
| Converts a velocity in mm/min into a device velocity (likely mrpm). More... | |
| int32_t | NemV4MillimetresToDevicePos (TNemesysV4 *Nemesys, double mm) |
| Converts a position in mm into a device position in inc. More... | |
| long | NemV4MoveDistance (TNemesysV4 *Nemesys, int32_t Distance, uint32_t Velocity) |
| Moves the pusher a certain distance from the current position. More... | |
| long | NemV4MoveToPos (TNemesysV4 *Nemesys, int32_t dwPosAbs, uint32_t dwVelocity) |
| Move pusher to a certain position. More... | |
| long | NemV4MoveWithVelocity (TNemesysV4 *Nemesys, int32_t Velocity) |
| Moves the syringe pusher with the given velocity. More... | |
| long | NemV4ReadAnalogInput (TNemesysV4 *Nemesys, enum eNemV4AnalogInput Input, int16_t *Value_mV) |
| Reads the analog input value of the given Input and returns it in Value_mV. More... | |
| long | NemV4ReadDigitalInput (TNemesysV4 *Nemesys, enum eNemV4DigitalInput Input) |
| Reads the state of one single digital input. More... | |
| long | NemV4ReadDigitalInputs (TNemesysV4 *Nemesys, uint32_t *Inputs) |
| Reads all 4 digital inputs from the device and returns the inputs bitmask in Inputs. More... | |
| long | NemV4ReadForceSensor (TNemesysV4 *Nemesys, float *Force_kN) |
| Reads the internal force sensor value scaled to kN. More... | |
| long | NemV4ReadStatusWord (TNemesysV4 *Nemesys, uint16_t *pwStatusWord) |
| Read status word from Nemesys. More... | |
| long | NemV4SetEnabled (TNemesysV4 *Nemesys) |
| Set single dosing unit into enable state. More... | |
| void | NemV4SetSyringe (TNemesysV4 *Nemesys, double InnerSyringeDiameter_mm) |
| Configure the syringe that is used for flow and volume unit conversion. More... | |
| long | NemV4SetSyringeLevel (TNemesysV4 *Nemesys, double Level_ul, double Flow_ul_min) |
| Set syringe to a certain fill level. More... | |
| long | NemV4Stop (TNemesysV4 *Nemesys) |
| Stops the current dosing move. More... | |
| long | NemV4SwitchValve (TNemesysV4 *Nemesys, uint8_t ValvePosition) |
| Switches a valve connected to the Nemesys I/O connector to a given position. More... | |
| long | NemV4WriteDigitalOutput (TNemesysV4 *Nemesys, enum eNemV4DigitalOutput Output, uint8_t On) |
| Switches one single digital output channel on/off. More... | |
| long | NemV4WriteDigitalOutputs (TNemesysV4 *Nemesys, uint32_t OutputMask, uint32_t States) |
| Switches the given digital outputs on/off. More... | |
| long | NemV4WriteForceLimit (TNemesysV4 *Nemesys, float ForceLimit_kN) |
| Sets a custom force limit. More... | |
Detailed Description
Application programming interface for control of Nemesys via RS232.
- Date
- 2019/03/12
Enumeration Type Documentation
| enum eCtrlWord |
Control words of object dictionary entry OD_H6040_CTRL_WORD.
| enum eNemOpModes |
Enumeration of Nemesys deviceoperation modes.
| enum eStatusWord |
Status words of object dictionary entry OD_H6041_STATUS_WORD.
Function Documentation
|
static |
Clears the device error history and error register.
The device keeps track of the errors that occured with an internal error history. The function NemV4ClerFault() calls this function to clear the error history.
- Parameters
-
[in] Nemesys The device to change
- Returns
- Error code - ERR_NOERR indicates success
Referenced by NemV4ClearFault().
Here is the call graph for this function:
|
static |
Execute one single drive state command.
The function excutes one drive state command, waits a certain amount of time for the drive to process the command (wProcessTime) and then reads the statusword of the device and returns it to the application.
- Parameters
-
[in] Nemesys The device to query [in] wCmd The command to execute [out] pwState State of the devcie after execution of the command in wCmd [in] wProcessTime Time between sending the command and reading the status
- Returns
- Error code - ERR_NOERR indicates success
Referenced by NemV4SetEnabled().
Here is the call graph for this function: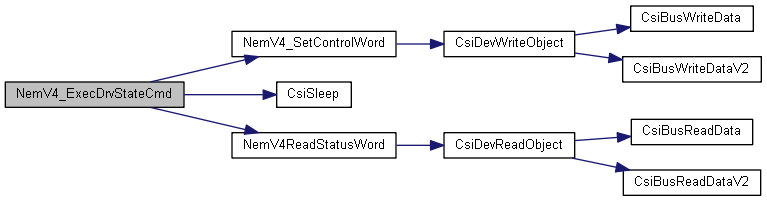
|
static |
Test the status word for a certain bit pattern.
The function applies the mask to the status word and checks if the masked statusword matches the bitpattern in state.
- Parameters
-
[in] Nemesys The device to query [in] wMask The bitmask to apply to device statusword [in] wState The state bitmask to check [out] pResult Result of the test (0 = false, 1 = true)
- Returns
- Error code - ERR_NOERR indicates success
Referenced by NemV4IsEnabled(), NemV4IsInFaultState(), and NemV4IsStopped().
Here is the call graph for this function:
|
static |
Transmits the controlword to the device.
Call this function to change th controlword.
- Parameters
-
[in] Nemesys The device to change [in] wControlWord The new controlword to store into device
- Returns
- Error code - ERR_NOERR indicates success
- See also
- NemV4Calibrate(), NemV4_SetHomingSpeed(), NemV4_SetHomingMode()
Referenced by NemV4_ExecDrvStateCmd(), NemV4ClearFault(), NemV4MoveToPos(), and NemV4Stop().
Here is the call graph for this function:
|
static |
Change operation mode of Nemesys device.
A Nemesys device can operate in two different operation modes. During normal dosing the device works in profile position mode (NEM_OP_MODE_PROFILE_POSITION). During calibration the device is in homing mode (NEM_OP_MODE_HOMING).
- Parameters
-
[in] Nemesys The device to change [in] OpMode The new operation mode to set
- Returns
- Error code - ERR_NOERR indicates success
Referenced by NemV4DevInit(), and NemV4MoveToPos().
Here is the call graph for this function: