

Overview
Basic low level motion control functions for execution of positioning tasks.
The functions in this group allow basic positioning of the pusher using device specific speed and position (increments) values. No syringe configuration is required for these functions because they use the native device units like increments for positions and mrpm for speed. These functions are called from the high level dosing functions (see Dosing and pump control functions).
 Collaboration diagram for Basic Motion Control Functions:
Collaboration diagram for Basic Motion Control Functions:
Functions | |
| long | NemV4GetCurrentVelocity (TNemesysV4 *Nemesys, int32_t *Velocity) |
| Read the actual velocity from the Nemesys. More... | |
| long | NemV4GetPosIs (TNemesysV4 *Nemesys, int32_t *PosIs) |
| Reads the actual position from the Nemesys. More... | |
| long | NemV4MoveDistance (TNemesysV4 *Nemesys, int32_t Distance, uint32_t Velocity) |
| Moves the pusher a certain distance from the current position. More... | |
| long | NemV4MoveToPos (TNemesysV4 *Nemesys, int32_t PosAbs, uint32_t Velocity) |
| Move pusher to a certain position. More... | |
| long | NemV4MoveWithVelocity (TNemesysV4 *Nemesys, int32_t Velocity) |
| Moves the syringe pusher with the given velocity. More... | |
Function Documentation
| long NemV4GetCurrentVelocity | ( | TNemesysV4 * | Nemesys, |
| int32_t * | Velocity | ||
| ) |
Read the actual velocity from the Nemesys.
- Parameters
-
Nemesys Nemesys to read from Velocity Stores the velocity in Nemesys units (speed in mrpm - millirevolutions per minute)
- Returns
- Error code - ERR_NOERR indicates success
Referenced by NemV4GetCurrentFlow().
Here is the call graph for this function:
| long NemV4GetPosIs | ( | TNemesysV4 * | Nemesys, |
| int32_t * | PosIs | ||
| ) |
Reads the actual position from the Nemesys.
- Parameters
-
Nemesys Nemesys to read from PosIs Returns the current position in Nemesys units (increments)
- Returns
- Error code - ERR_NOERR indicates success
Referenced by NemV4GetSyringeLevel(), NemV4MoveDistance(), and NemV4SetSyringeLevel().
Here is the call graph for this function:
| long NemV4MoveDistance | ( | TNemesysV4 * | Nemesys, |
| int32_t | Distance, | ||
| uint32_t | Velocity | ||
| ) |
Moves the pusher a certain distance from the current position.
This function executes a relative move from the current position. The sign of the distance parameter configures the direction of the move. A negative value will pull the pusher and a positive value will push the syringe pusher into the syringe
- Parameters
-
Nemesys Nemesys device to move Distance The distance in increments. The sign configures the direction Velocity The device velocity value.
- Returns
- Error code - ERR_NOERR indicates success
Referenced by NemV4DoseVolume().
Here is the call graph for this function: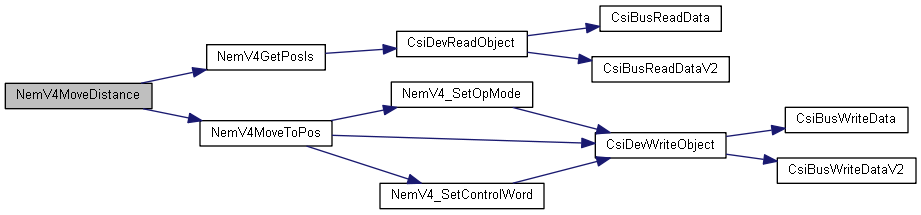
| long NemV4MoveToPos | ( | TNemesysV4 * | Nemesys, |
| int32_t | PosAbs, | ||
| uint32_t | Velocity | ||
| ) |
Move pusher to a certain position.
This function executes an move to an absolute position. This is a low level function that is called from other API functions to execute dosing tasks.
- Parameters
-
[in] Nemesys The Nemesys to move [in] PosAbs The position value in increments [in] Velocity The speed in mrpm (millirevolutions per minute)
- Returns
- Error code - ERR_NOERR indicates success
Referenced by NemV4MoveDistance(), NemV4MoveWithVelocity(), and NemV4SetSyringeLevel().
Here is the call graph for this function:
| long NemV4MoveWithVelocity | ( | TNemesysV4 * | Nemesys, |
| int32_t | Velocity | ||
| ) |
Moves the syringe pusher with the given velocity.
The sign of the velocity value indicates the direction. A negative value means aspiration and a positive value means dispension. The pusher will move until the minimum or maximum position is reached
- Parameters
-
Nemesys The nemesys device to control Velocity The device specific velocity value. The sign indicates the move direction.
- Returns
- Error code - ERR_NOERR indicates success
Referenced by NemV4GenerateFlow().
Here is the call graph for this function: