

Dosing
Overview
This group defines all required functions for execution of different dosing tasks like dosing a certain volume or generating a constant flow.
 Collaboration diagram for Dosing:
Collaboration diagram for Dosing:
Functions | |
| long | NemDoseVolume (TNemesys *Nemesys, uint32_t dwVolume, int32_t dwFlowRate) |
| Dose a certain volume with a certain flowrate. More... | |
| long | NemGenerateConstantFlow (TNemesys *Nemesys, int32_t dwFlowRate) |
| Generate a constant flow rate. More... | |
| long | NemSetSyringeLevel (TNemesys *Nemesys, uint32_t dwSyringeLevel, uint32_t dwFlowRate) |
| Set syringe to a certain fill level. More... | |
| long | NemStop (TNemesys *Nemesys) |
| Stops actual dosing move. More... | |
Function Documentation
| long NemDoseVolume | ( | TNemesys * | Nemesys, |
| uint32_t | dwVolume, | ||
| int32_t | dwFlowRate | ||
| ) |
Dose a certain volume with a certain flowrate.
This call moves the pusher to a target position until the target volume is dosed or until the upper or lower limit is reached.
- Parameters
-
[in] Nemesys Device to move [in] dwVolume Volume (relative position range) to dose. The value is given in increments [in] dwFlowRate The flow rate (speed) in mrpm (milli revolutions per second). The sign of the flowrate value defines the direction: flowrate < 0 = aspiration flowrate > 0 = dispense
- Returns
- Error code - ERR_NOERR indicates success
static long Nem_MoveToPos(TNemesys *Nemesys, int32_t dwPosAbs, uint32_t dwVelocity)
Move pusher to a certain position.
Definition: nem_rs232_api.c:902
static long Nem_GetPosIs(TNemesys *Nemesys, int32_t *pdwPosIs)
Query actual device position value.
Definition: nem_rs232_api.c:765
Here is the call graph for this function: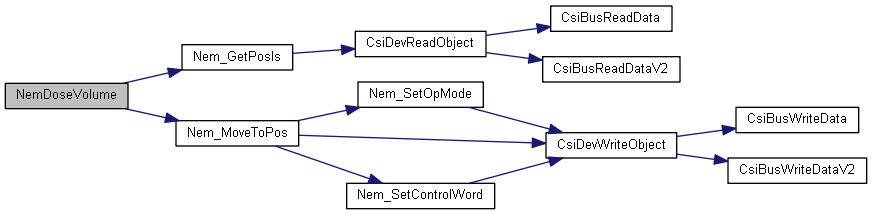
| long NemGenerateConstantFlow | ( | TNemesys * | Nemesys, |
| int32_t | dwFlowRate | ||
| ) |
Generate a constant flow rate.
The pusher moves until the upper or lower limit is reached or until the user manually halts the movement.
- Parameters
-
[in] Nemesys Device to move [in] dwFlowRate The flow rate (speed) in mrpm (milli revolutions per second). The sign of the flowrate value defines the direction: flowrate < 0 = aspiration flowrate > 0 = dispense
- Returns
- Error code - ERR_NOERR indicates success
- See also
- NemStop()
static long Nem_MoveToPos(TNemesys *Nemesys, int32_t dwPosAbs, uint32_t dwVelocity)
Move pusher to a certain position.
Definition: nem_rs232_api.c:902
Here is the call graph for this function:
| long NemSetSyringeLevel | ( | TNemesys * | Nemesys, |
| uint32_t | dwSyringeLevel, | ||
| uint32_t | dwFlowRate | ||
| ) |
Set syringe to a certain fill level.
This call moves the pusher to a certain position.
- Parameters
-
[in] Nemesys Device to move [in] dwSyringeLevel The fill level (absolut position) in increments [in] dwFlowRate The flow rate (speed) in mrpm (milli revolutions per minute)
- Returns
- Error code - ERR_NOERR indicates success
- See also
- NemGetSyringeLevel()
static long Nem_MoveToPos(TNemesys *Nemesys, int32_t dwPosAbs, uint32_t dwVelocity)
Move pusher to a certain position.
Definition: nem_rs232_api.c:902
static long Nem_GetPosIs(TNemesys *Nemesys, int32_t *pdwPosIs)
Query actual device position value.
Definition: nem_rs232_api.c:765
Here is the call graph for this function: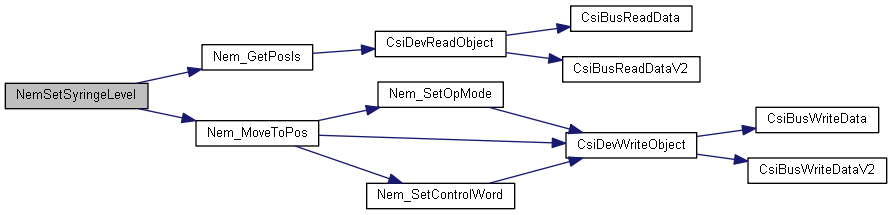
| long NemStop | ( | TNemesys * | Nemesys | ) |
Stops actual dosing move.
This function immediatelly stops the actual dosing move.
- Parameters
-
[in] Nemesys Device to stop
- Returns
- Error code - ERR_NOERR indicates success
static long Nem_SetControlWord(TNemesys *Nemesys, uint16_t wControlWord)
Transmits the controlword to the device.
Definition: nem_rs232_api.c:711
Here is the call graph for this function: