Initialisation
Overview
This group defines all required functions to initialize a correct communication to neMESYS Bus and to a certain device.
 Collaboration diagram for Initialisation:
Collaboration diagram for Initialisation:
Functions | |
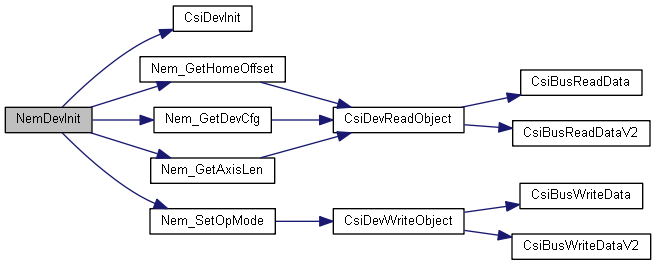
| long | NemDevInit (struct CsiBus *Bus, uint8_t NodeId, TNemesys *Nemesys) |
| Initialize neMESYS device object with all parameters This function reads configuration parameters from device and stores the parameters into the device object. More... | |
Function Documentation
Initialize neMESYS device object with all parameters This function reads configuration parameters from device and stores the parameters into the device object.
After a call to this function all other functions that require a valid device object can be called.
- Parameters
-
[in] Bus Reference of bus object the device is attached to [in] NodeId NodeId of dosing unit to initialize [in] Nemesys Reference to device object to initialize
- Returns
- Error code - ERR_NOERR indicates successfull initialisation
static long Nem_GetAxisLen(TNemesys *Nemesys, uint32_t *pAxisLen)
Reads the absolut axis length in increments from device.
Definition: nem_rs232_api.c:755
int8_t ValveStateDisp
valve state: 1 = dispense, 0 = aspirate
Definition: nem_rs232_api.h:47
static long Nem_GetDevCfg(TNemesys *Nemesys, uint32_t *NemesysCfg)
Reads device configuration (gear, encoder spindle slope, valve).
Definition: nem_rs232_api.c:745
long CsiDevInit(struct CsiBus *pBus, uint8_t NodeId, struct CsiDev *pDev, enum CsiSerialProtocolVersion SerProtocolVersion)
Initialize CSI device object with all parameters.
Definition: csi_dev.c:127
uint32_t DevCfg
contains configuration for gear, spindle slope, encoder and valve
Definition: nem_rs232_api.h:44
static long Nem_SetOpMode(TNemesys *Nemesys, TNemOpModes OpMode)
Change operation mode of neMESYS device.
Definition: nem_rs232_api.c:664
static long Nem_GetHomeOffset(TNemesys *Nemesys, int32_t *pHomeOffset)
Read the home ofset from the device.
Definition: nem_rs232_api.c:736
profile psoition mode - required for any dosing task
Definition: nem_rs232_api.c:92
Here is the call graph for this function: